Skydio Blog
Featured  Skydio
Skydio
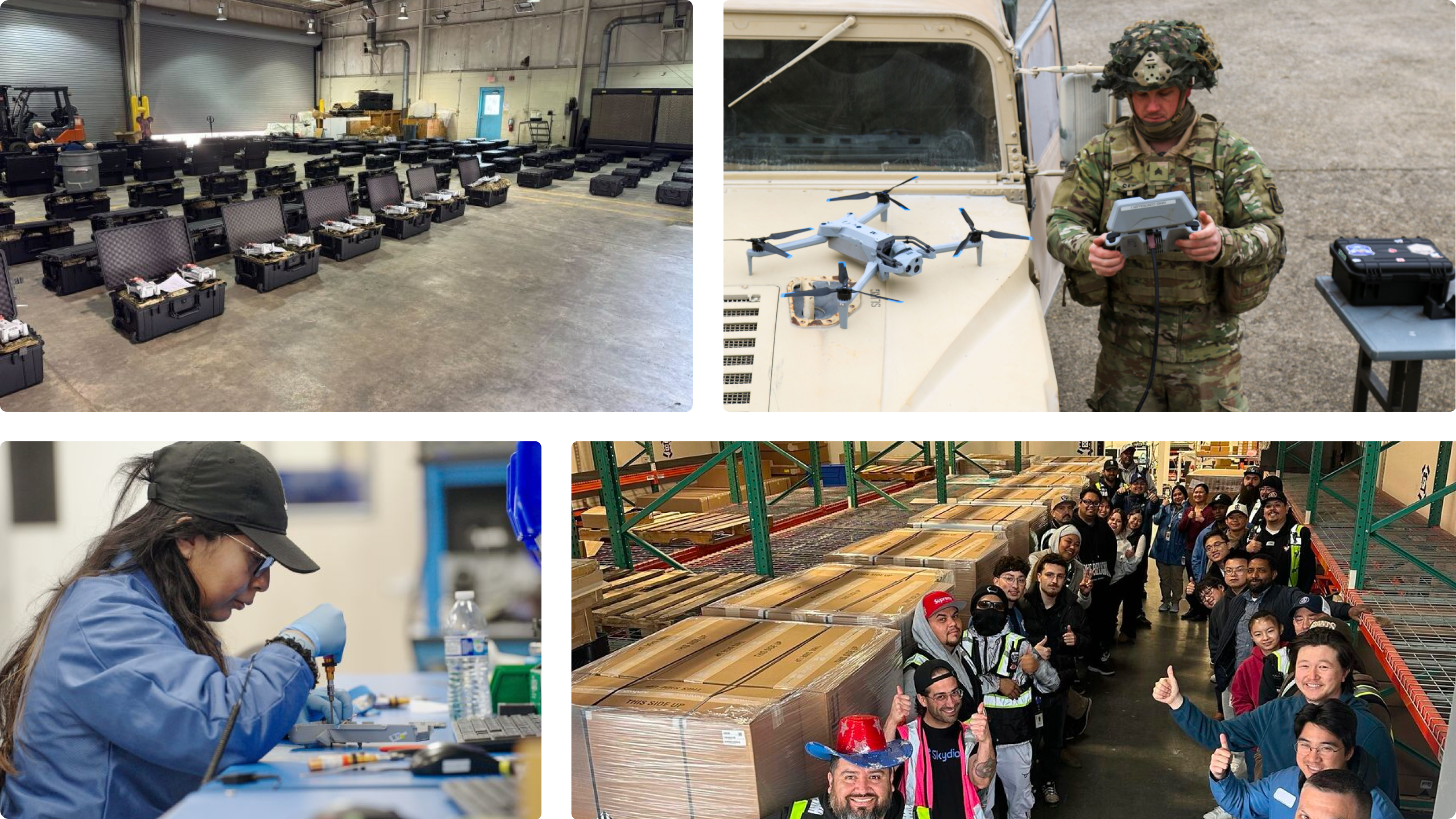
Read post Skydio Delivers the First Systems for Tranche 2 of the U.S. Army’s Short Range Reconnaissance Program, Equipping a Deploying Unit in Days
Skydio Browse all posts
Read post

Public Safety Grants 101: Crafting a Narrative and Budget

Skydio Announces Opening of First European R&D Office in Tampere, Finland
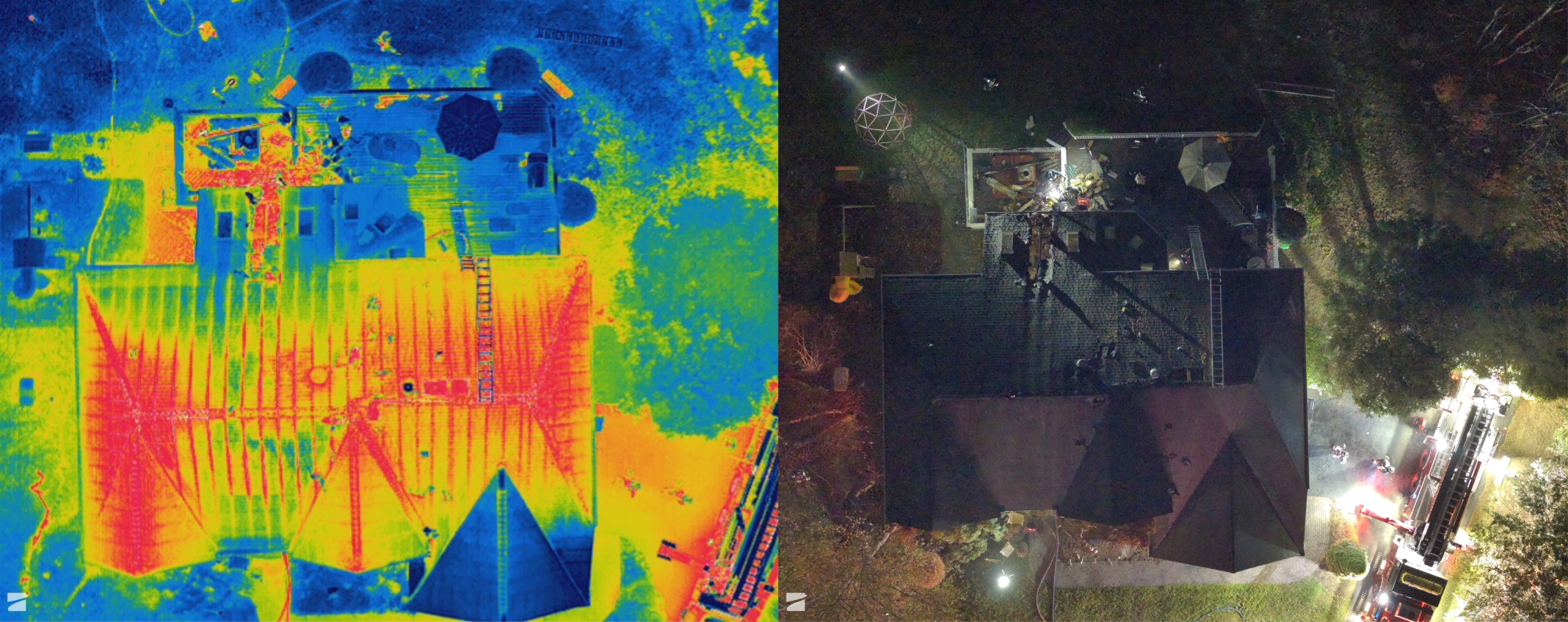
Drones for Fire Service: Real-Time Insights & Safety.

Skydio Establishes America’s First Drone as First Responder Center of Excellence Through its Partnership with The Atlanta Public Safety Training Center

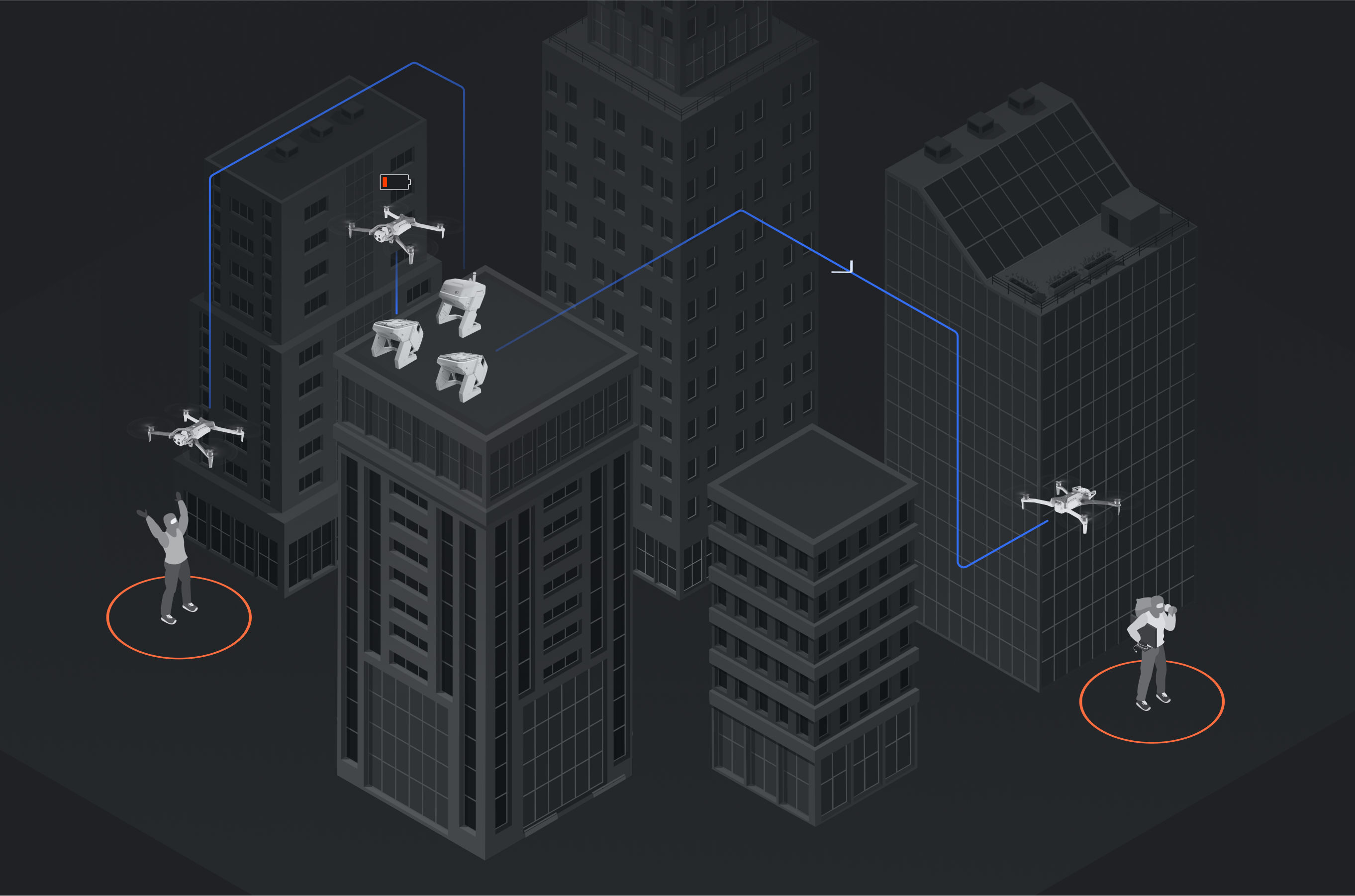
Addressing Connectivity Gaps in Drone as First Responder Missions

Skydio Extends its Modular, Open Platform to Support Custom Attachments for X10D

Spain’s Ministry of Defense Selects Skydio X10D Autonomous Drones in €18 Million Initial Tender

Skydio X10D Maintains Position on U.S. Department of Defense’s Blue UAS Cleared List
DFR math: Why Incident Volume Counts
Skydio DFR Command is Now Available to Agencies of All Sizes