
Every last detail.
From a millimeter to a mile. Day or night. Rain or shine. For your mission.
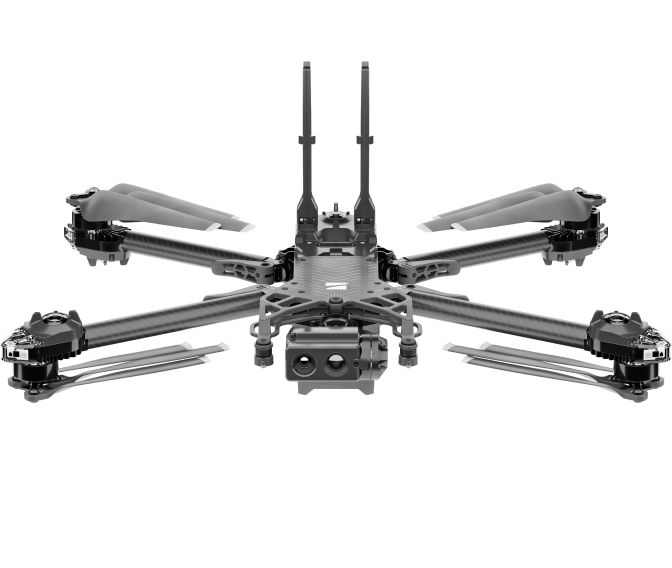
Introducing the revolutionary Skydio X10 drone.
Where breakthrough AI meets best-in-class data capture. All on a modular airframe that fits in a backpack.
Skydio X10: Epic Optics
Supercharge your sight.
Collect quality insights anywhere with ultra-high resolution visual and radiometric thermal cameras.
Explore Skydio X10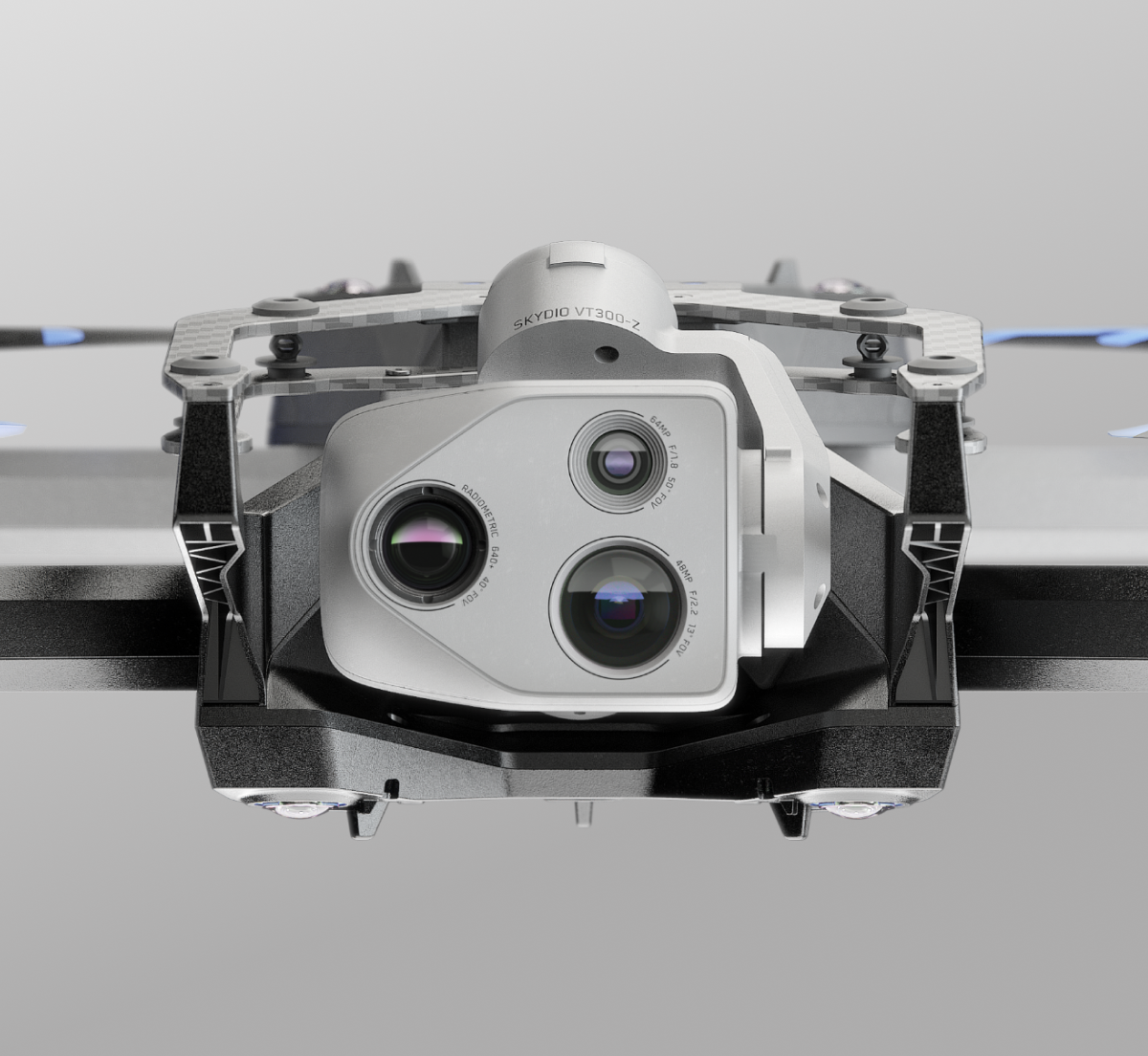

Skydio X10: Onboard AI
Turn complex jobs into completed jobs.
Automate difficult inspections with the Skydio X10 drone that captures and compiles data on its own. It’s as easy as pressing 'go'.
Explore Skydio Autonomy

Skydio X10: Remote Ops
Pilot from a browser. From anywhere.
Launch and fly Skydio X10 from a browser to get an extra set of eyes on any situation.
Explore Remote Flight Deck


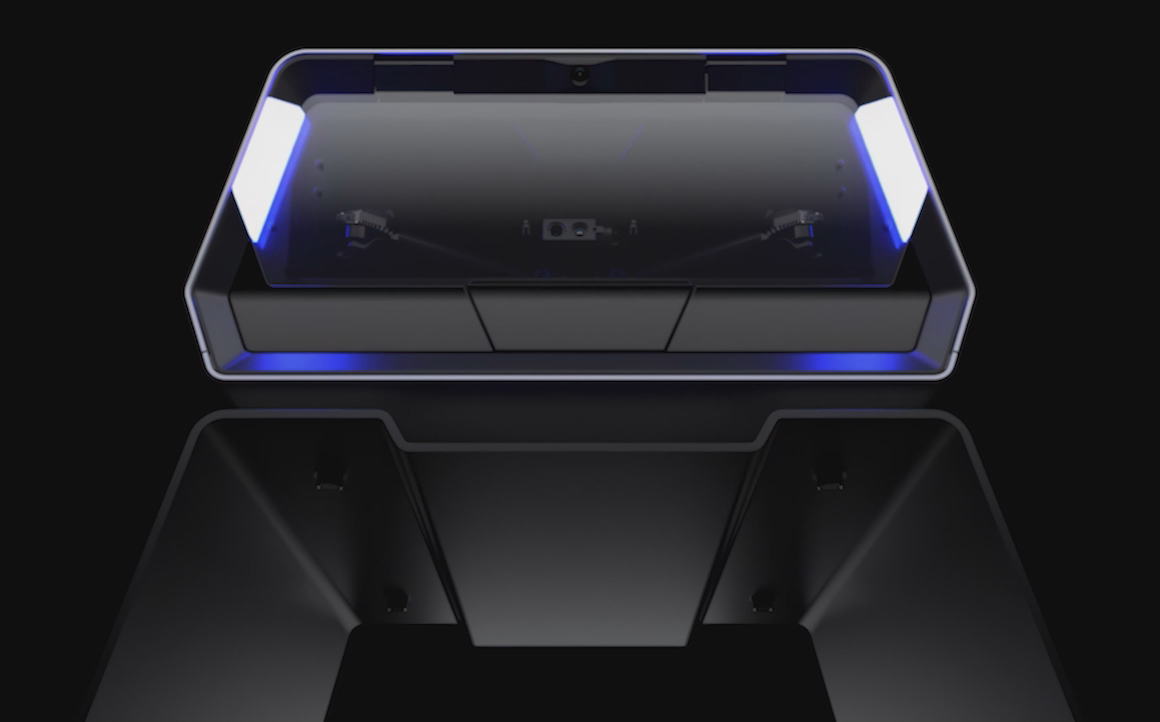
Skydio X10: Drone as First Responder
Get frontline visibility 24/7 with a Drone as First Responder program.
Combine X10’s best-in-class autonomous flight, Remote Flight Deck, NightSense, and more to bring unprecedented levels of situational awareness to first responders.
Learn More about Skydio DFRSkydio
Spotlights.
NYC Mayor says drones will make city services faster and safer, unveils guidelines

Stantec keeps Interstate 80 moving with better bridge inspections

Drones are a force multiplier for Air National Guard

ComEd improves resiliency, monitoring asset health with drones

Oklahoma City PD expands its use of drones for first response.

Pacific Gas and Electric gains efficiencies by operating drones remotely
Join the industry leaders that choose Skydio.













This product or service has not been approved or endorsed by any governmental agency, and this offer is not being made by an agency of the government.


We don’t just build drones.
We build drone programs.

Build skills
We offer a full catalog of courses through Skydio Academy. Get started or dive deeper for certification.

Get support
Our U.S.-based support team and customer success managers are readily available to ensure your program’s success.
Fly BVLOS
Skydio Regulatory Services can help you with the Beyond Visual Line of Sight waiver application process.
The leader in autonomous flight.
Nine years and counting.

Skydio X10
Breakthrough AI and visionary sensors on a modular airframe that fits in a backpack.
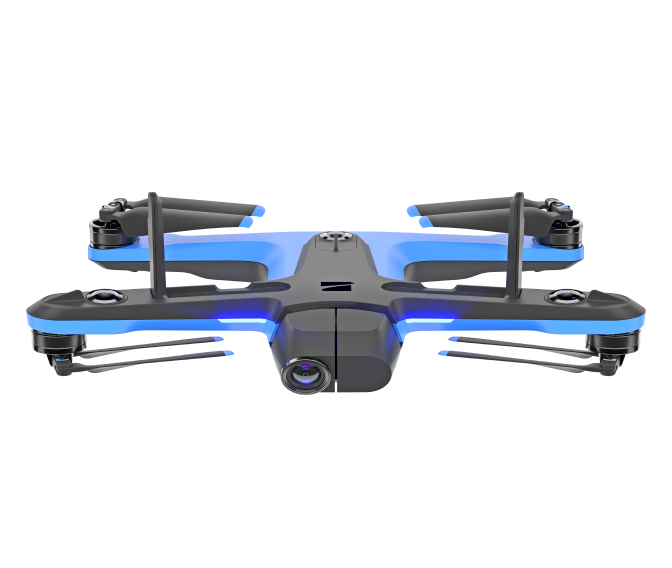
Skydio 2+
Compact airframe for data capture in tight spaces and fully autonomous indoor flight.